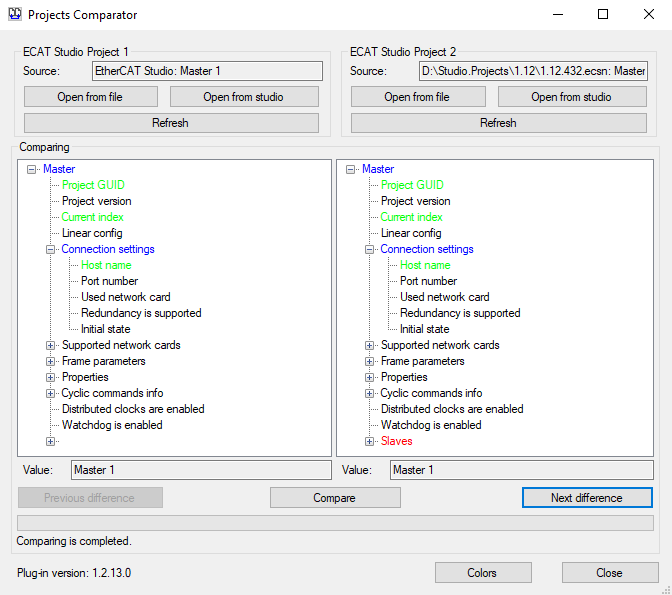
- Обработка и сравнение файлов проекта
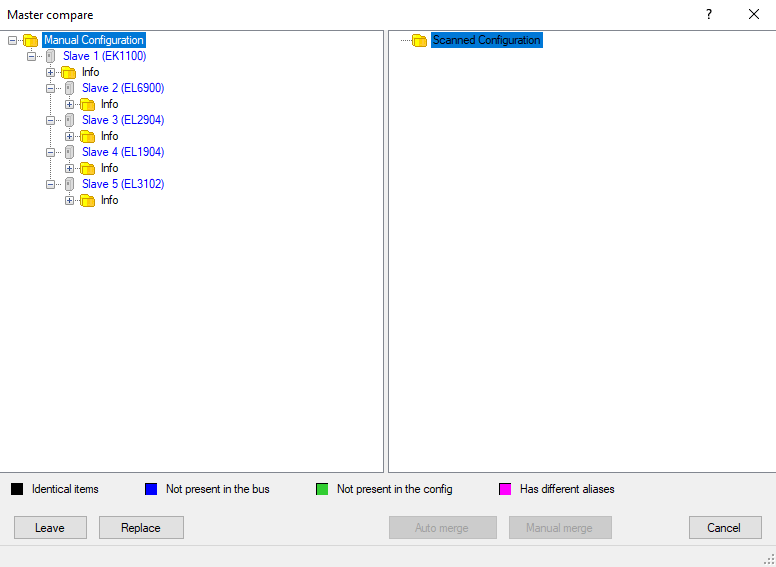
- Создание топологии путем сканирования шины, чтения из файла или перетаскивания (функция drag-and-drop)
- Сравнение физической сети с сетью проекта
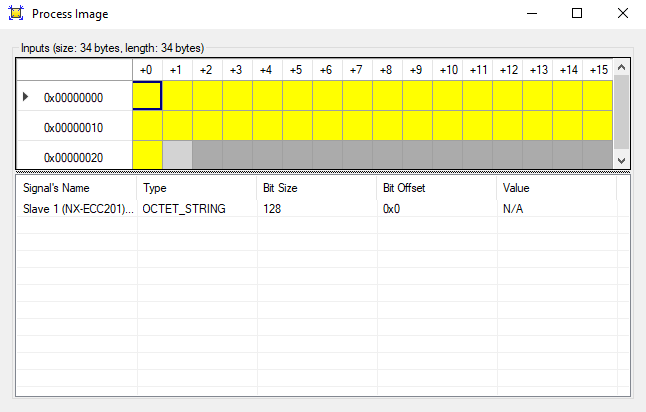
- Отображение процесса со шкалированием
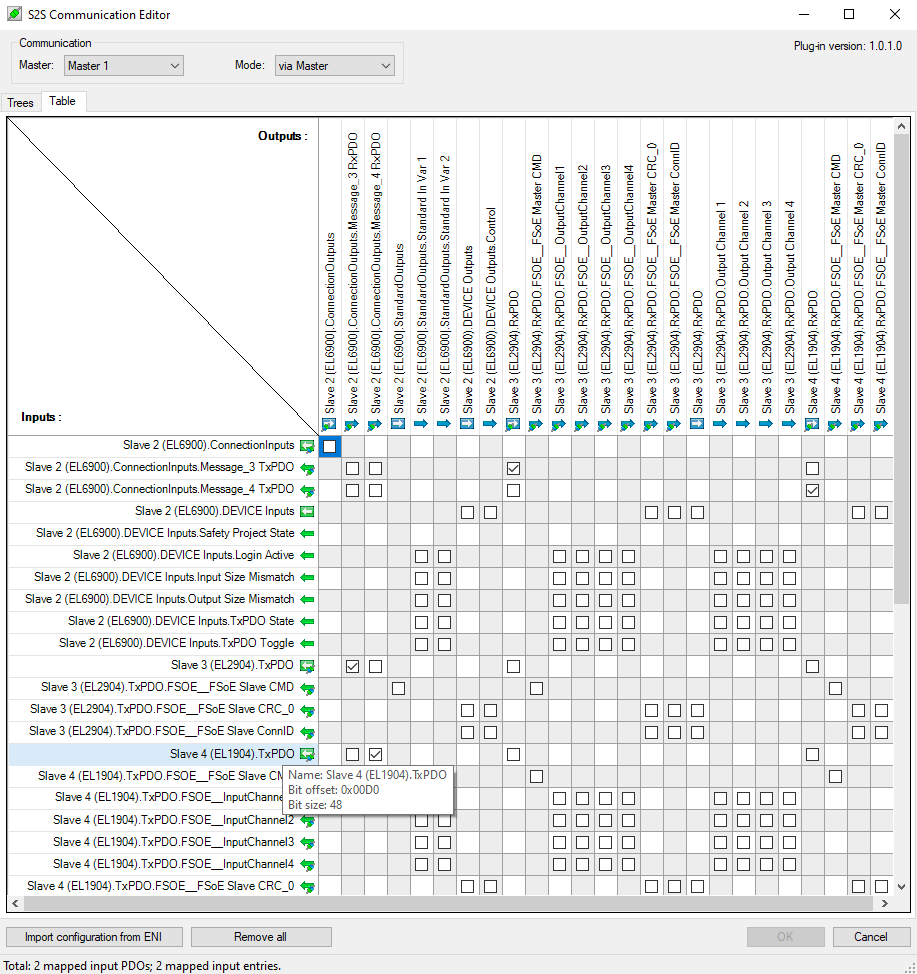
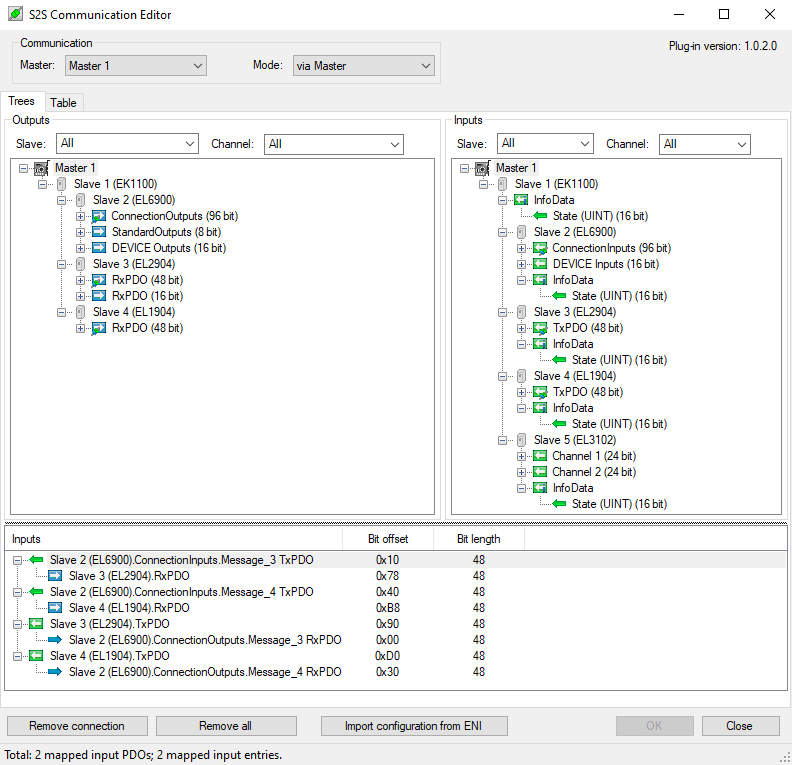
- Редактор Slave-to-Slave (S2S)
- Поддержка функциональной безопасности (FSoE) для ведущего и ведомых устройств
- Поддержка различных частот сканирования
- Настройки распределенных часов (DC)
- Импорт названий сигналов из CODESYS
- Экспорт файлов конфигурации сетей:
- ETG.2100 с расширениями koenig-pa GmbH, ETG.2100
- IEC 61131-3, экспорт заголовочных файлов на языке “C”
Сетевая конфигурация ведущего устройства
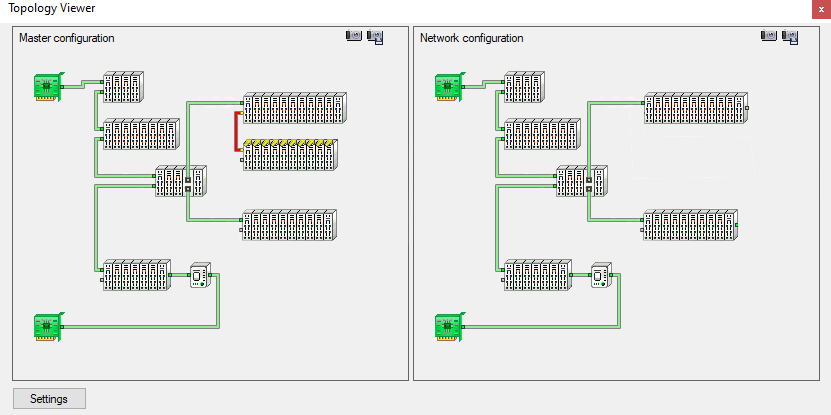
Кабельное резервирование EtherCAT
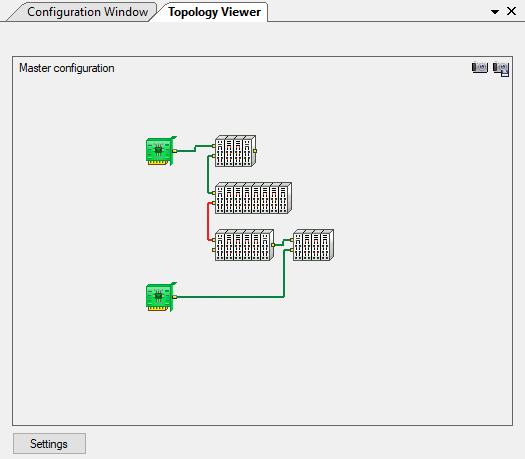
Связь между ведомыми устройствами (Slave-to-Slave)
Настройка связи Slave-to-Slave (S2S) обеспечивает логическое взаимодействие ведомых устройств через массив входных и выходных данных в образе процесса без физического кабельного соединения между ними.
Посредством связи S2S осуществляется управление системой безопасности. Система безопасности использует так называемый подход «черного канала», где функциональная безопасность EtherCAT (FSoE) находится наверху стековой памяти ведомого устройства. Здесь безопасность и обычный процесс смешиваются в одно тело. Ведущее устройство EtherCAT должно маршрутизировать сообщение(-ия) безопасности от ведомых устройств безопасности к ведущим устройствам безопасности используя связь S2S. В случае развития небезопасной ситуации функция связи S2S теряет возможность отсылать данные и, в связи с этим, циклический контроль резервирования и статус будут равны 0 вместо валидных данных. В этом случае запускается логика безопасности в соответствии с заданным поведением.