New features in version 2.11.11700 (in development)
Dashboard
The new version of VS EtherCAT Studio provides users with Dashboard. The window was added to display bus slaves properties and bus ports parameters.

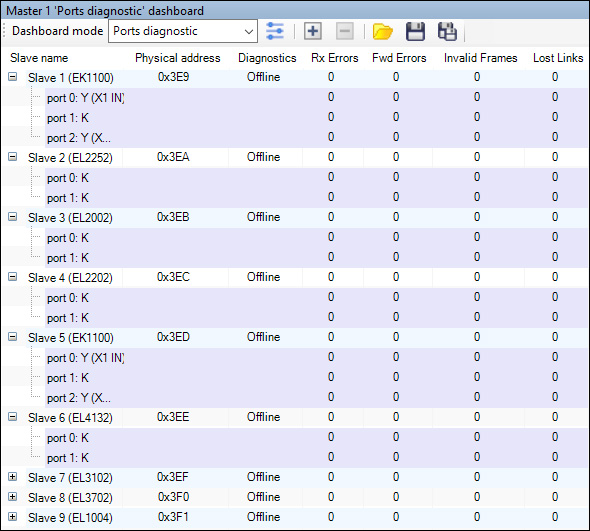
User can select General (slave properties) or Port statics (ports parameters) mode and adjust by themselves the columns to display.
In VS EtherCAT Studio Premium it is possible to create new dashboard by clicking  .
.
There is an opportunity to load another settings from the folder by clicking  .
.
As well, the user can save current settings to the XML file to use them in the future by clicking  .
.
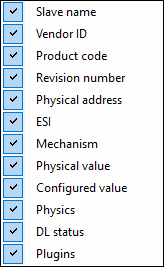
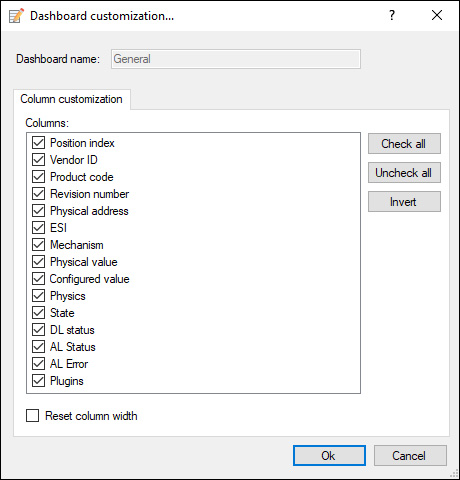
Besides, the user can select which column should be displayed in the dashboard window, right click any column name and fill corresponding check boxes.
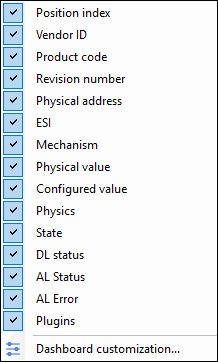
Dashboard customization is accessible in VS EtherCAT Studio Premium by clicking  .
.
Detailed progress dialogs
To let user know about the status of loading, during the project opening and PDO loading appear progress bars.
During scanning or attaching the Master, appears the progress dialog where user can oversee the progress or break up the scanning or connection.
Additionally, added messages about reading OD via SDO while attaching.
Arrays elements
Arrays elements in configuration tree:
Version 2.11 provides the ability to observe array variables in the configuration tree. The user can see the type, length, and signals quantity there.
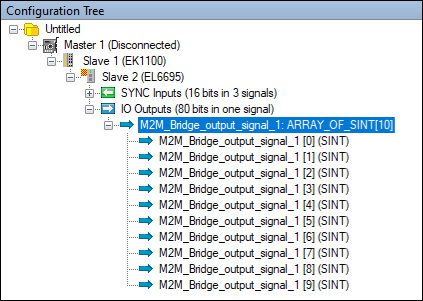
Additionally, the user can set default value for array elements.
M2M plugin:
The feature enables the automatic configuration for secondary device during M2M plugin activation and supports arrays for EL6692/EL6695 including arrays > 255 bits.
Manual merge
The window allows the user to add slaves to the resulting configuration manually. To replace all items in the manual configuration by the bus configuration items use the Replace All button. The items stands in the same order as on the bus. The Insert All New button allows to add to the current Studio configuration the items that are missed there. The items inserted to the places corresponding to their places on the bus.
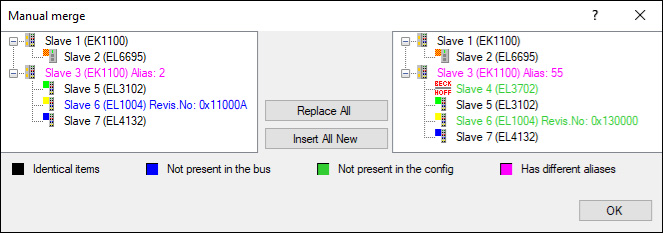
The current Studio configuration is displayed in the left pane while the bus configuration – in the right one. The colors of the slaves show the slaves status in the configurations.
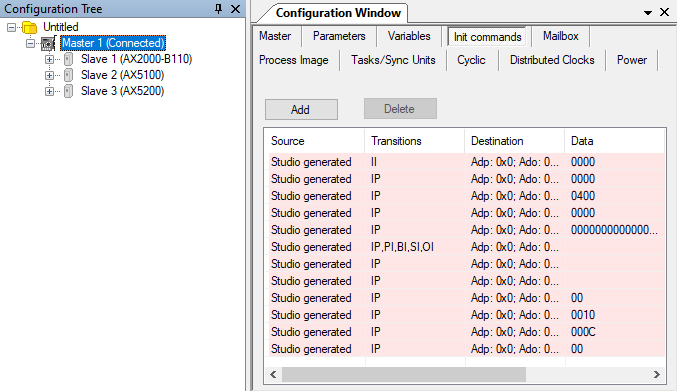
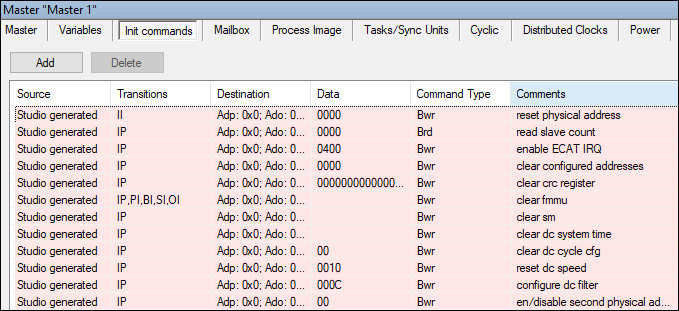
Master Init commands
This feature provides the possibility to add Init command to Master. The tab allows to apply commands which are common for all Slaves.
CAN interface plugin
In VS EtherCAT Studio 2.11 the ESD CAN-EtherCAT device is supported in the CAN interface plugin. This update allows to configure the ESD CAN-EtherCAT device to work with a CAN bus.Bus configuration window
The Bus configuration window is accessible from the View menu and serves to show plain bus configuration.
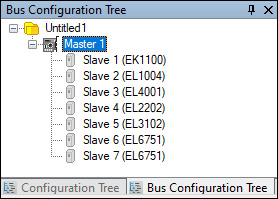
The window is useful to build the topology in case of error issues.
Improved Slaves Library loading performance
Implemented new function that allows to read ESI partially and load only those setting that are required. Thanks to that the process of Slaves Library loading became faster and the Salve Library takes up less space.ESD CAN-EtherCAT device support
In new Studio version ESD CAN-EtherCAT device is supported in CAN interface plugin. This update allows to configure the ESD CAN-EtherCAT device to work with a CAN bus.Init command for Master
In this version appears new tab – Init command for Master. This feature provides the possibility to add Init command to Master. The tab allows to apply commands which are common for all Slaves.