VS EtherCAT master stack has a modular structure to respond to a challenge of each particular implementation. It makes the master scalable to fit the size of application, portable to different operating systems, adaptable to various hardware platforms and allows developing or customizing each module separately while keeping the functionality of the others intact.
Master’s modules are grouped in the following layers, thereby all functions are clearly separated:
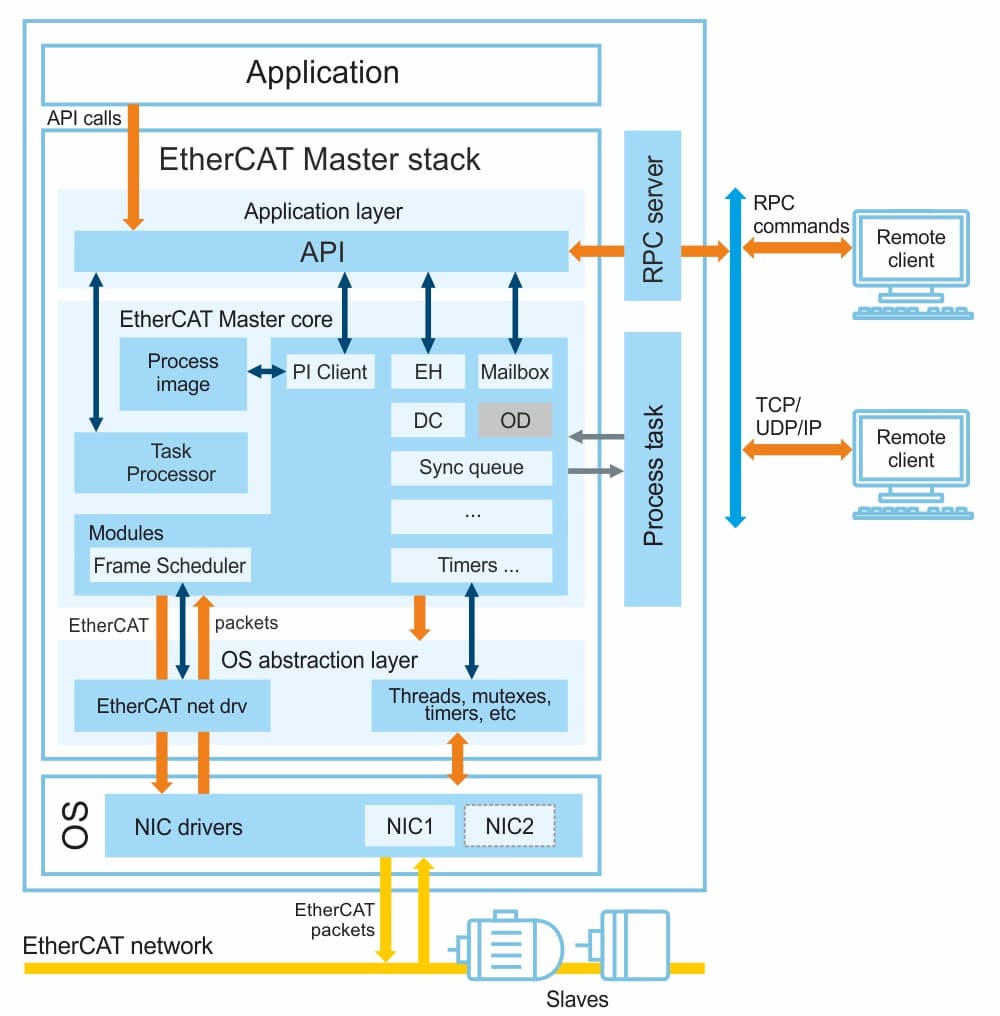
Application layer
Application layer is responsible for interaction with various programming or/and configuration environments and other applications or devices. It encapsulates and
- ensures access to master’s functions from the side of applications or process tasks
- allows interaction with the master by means of Remote Procedure Calls service and provides TCP/IP or/and UDP connections, for example, for mailbox communication with slaves via UDP
VS EtherCAT Master Stack Core
Mailbox moduleVS Master Core mailbox module deploys protocols to handle service data objects (SDP), data transfer and data exchange. The following protocols – according to the EtherCAT standard – are already supported:
- CAN application protocol over EtherCAT (CoE)
- Ethernet over EtherCAT (EoE)
- Servo Profile over EtherCAT (SoE)
- File Access over EtherCAT (FoE)
- Vendor specific Profile over EtherCAT (VoE)
- ADS over EtherCAT (AoE)
Process Image addresses are provided by EtherCAT network information (ENI) file, generated by a configuration tool. Access to the process image from control/process tasks is carried out through the master interface.
Distributed Clocks ModuleDistributed Clocks (DC) module enables all EtherCAT devices (master and slaves) to always share the same EtherCAT system time. This is done by compensating offset and drift time.
Frame Scheduler Module – Different Scan Rates for PDOIn the configuration tool the user defines scan rates for each slave individually. Frame Scheduler module manages velocity of EtherCAT frames by forwarding them to EtherCAT network driver.
VS EtherCAT Master Stack OSAL
Operating System abstraction layer (OSAL)
Master Stack OSAL allows making the master portable to any operating system with less effort.
The layer consists of two modules:
- OS functions module contains wrappers for OS-dependent functions that deal with threads, timers, mutexes, etc.
- Network adapter driver module that abstracts the master stack core from the underlying network implementation.